
机器人与智能装备团队在机构学领域国际期刊发表新成果
时间:2026-06-23 作者: 浏览次数:
(机械工程学院 通讯员 刘文瑞)近日,机械工程学院机器人与智能装备科技创新团队在机构学领域国际期刊Mechanism and Machine Theory上发表了题为“A unified synthesis method for path generation of planar four-bar mechanisms using feature coupler circle”的研究论文。 机械工程学院刘文瑞副教授为第一作者,秦涛教授为通讯作者,学校为第一单位和通讯单位。该研究获湖北省自然科学基金和湖北省重点研发项目资助,研究工作依托康复医学与康复工程技术襄阳市重点实验室和医工交叉研究中心展开。
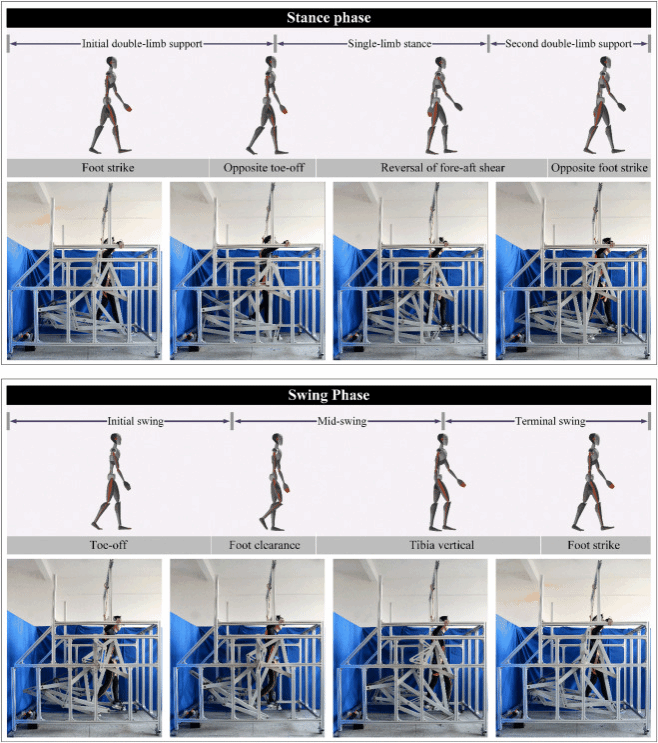
机构是机械装备的核心,机构设计理论与方法是现代机械产品创新的重要基础。本研究针对传统连杆机构轨迹综合方法存在优化维度高、搜索空间冗余、求解效率低等问题,提出了基于连杆特征圆(FCC)的机构设计方法。该方法可大幅压缩搜索空间维度,变量数目不随轨迹点数量变化,同时适用于开区间和闭区间尺度综合。团队将该方法应用到下肢康复机器人机构创新中,研制了工程样机,验证了所提出方法精度、鲁棒性优异。
在此基础上,团队将研究成果推广到球面连杆机构尺度综合中,基于FCC提出了非预定时标设计要求的球面连杆机构尺度综合方法,构建了统一设计理论框架,对应研究成果“Optimal Synthesis for Path Generation for a Spherical Four-Bar Mechanism”发表于机械设计领域期刊ASME Journal of Mechanical Design。
审核:王中任
责编:卜润慧 焦树国
 返回列表
返回列表 最新阅读
最新阅读





 鄂公网安备 42060202000064号 维护制作:党委宣传部
鄂公网安备 42060202000064号 维护制作:党委宣传部 